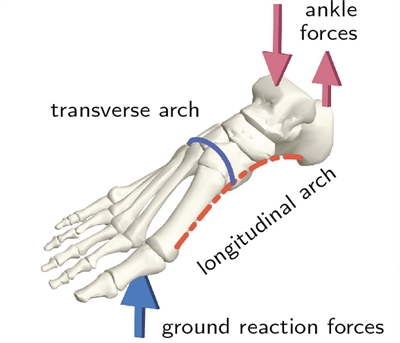
足部骨骼的足弓和典型承重方式的示意圖。圖片來源:《自然》
科技日報北京2月26日電 (記者張夢然)根據英國《自然》雜志26日在線發表的一項生物力學研究,美、日、英等國聯合團隊首次揭開人類雙足演化形成特有的足弓使人類得以行走和奔跑的關鍵機制,這一發現加深了對人類雙足演化的認識,將直接有助于改進機械足設計,進而為“物理靈活性”機器人鋪平道路。
在實現優雅自然地行走這方面,機械足和機器人的表現一直不盡如人意,步態運動的協調性和機械足的靈巧度,也一直是業界難題。但這對人類來說卻輕而易舉,人類演化形成了堅硬足弓,對于有效的直立行走至關重要,不過奇怪的是,黑猩猩、大猩猩和獼猴等其他靈長類動物的腳則相對靈活、扁平。生物力學研究人員一直爭論的一個問題是:人類雙足的構造,究竟如何令足部堅硬。大多數研究都集中在從腳后跟到腳掌的內側縱弓(MLA),而未考慮足橫弓(TTA)的作用。
為了研究TTA是否會讓雙足堅硬,研究團隊對人類雙足進行了彎曲測試。結果表明,足部硬度40%以上源自TTA。從中間折一張紙,會使其縱向變硬,TTA對足部的作用與之類似。
研究人員還研究了多種靈長類動物的TTA的演化,包括已滅絕的古人類,進而發現:只有人屬才充分演化形成了MLA和TTA。
這些發現表明,這兩個相鄰足弓共同作用,使足部縱向產生了硬度。此外,人類足部經過了多個階段的演化,才得以讓人類高效地行走和奔跑。
澳大利亞昆士蘭大學研究人員格蘭·里奇特沃克和盧克·凱利在論文隨附的新聞與觀點文章中表示,這一機制的闡明,未來將可以直接用于機械足、仿人腳的假肢以及有腿機器人的設計。
總編輯圈點
有趣的是,在物理世界中,一些看似很小的障礙反而會讓強大的機械陷入困境,不可避免地遭遇真實世界帶來的難題,而這些障礙幾乎不能用數學模型提前假設。過去幾十年來,工程師也會不斷嘗試通過基于預測性數學模型軟件去引導機械和機器人的肢體活動。然而,這個方法在用于機器人肢體執行行走這類極為簡單的任務時,被證明無效。因此,只有更好地理解人類在肢體動作中如魚得水的真正原因,才有望實現更為流暢自如的機械運動,或許,機械的“生命”,就是從仿生開始的。
關鍵詞: